2310018808
在线咨询
Email:
sales@tnkey.cn
Home
->
Products
->
TeachTraining
->
RobLab Teach Training
Planar inverted pendulum
友情提示:(1)有问题: 可以点击 右边中-在线咨询,左侧qq,旺旺在线联系
(2)感兴趣: 可以点击 左侧中-分享到
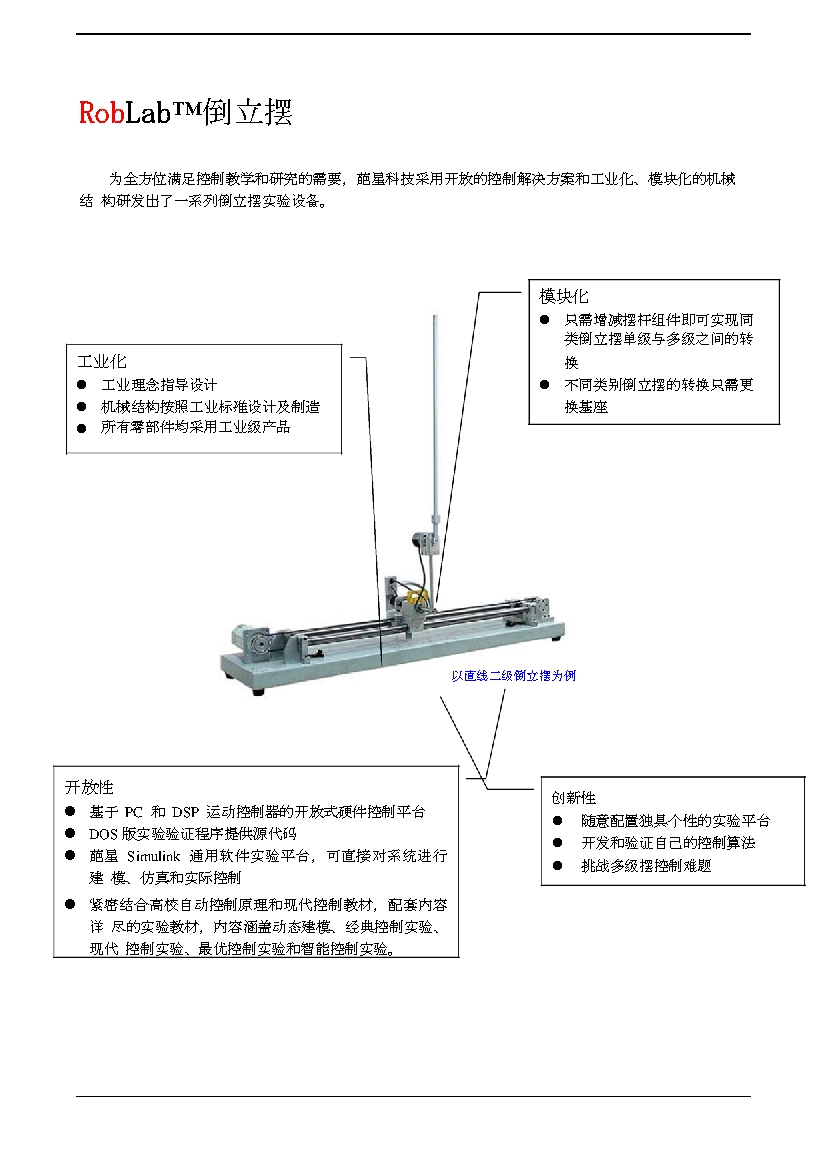
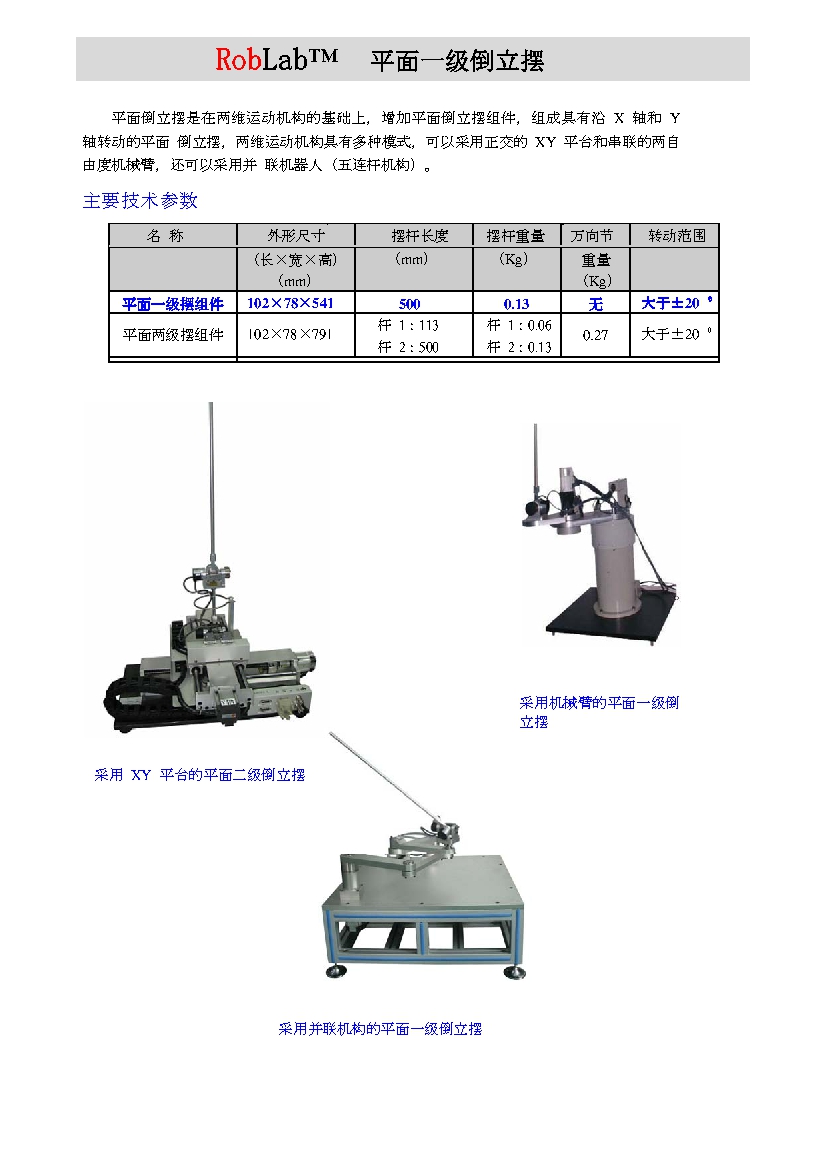
平面倒立摆
倒立摆系统是一个非线性自然不稳定系统, 是进行控制理论教学及开展各种控制实验的理想实验平台。许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。除教学用途外,倒立摆系统的高阶次、不稳定、多变量、非线性和强耦合等特性使得许多现代控制理论的研究人员一直将它视为研究对象。他们不断从研究倒立摆控制方法中发掘出新的控制方法,并将其应用于航天科技和机器人学等各种高新科技领域。